NMPC with CasADi and Python – Part 3: State-space equations of a 2-DOF robot with SymPy or MATLAB
CasADi is a powerful open-source tool for nonlinear optimization. It can be used with MATLAB/Octave, Python, or C++, with the bulk of the available resources referencing the former two options. This post series is intended to show a possible method of developing a simulation for an example system controlled by Nonlinear Model Predictive Control (NMPC) using CasADi and Python.
In this post, we will look at determining the system equations of a robot with two degrees of freedom in stace-space form. These state-space equations can be used for simulation and for developing a nonlinear model predictive controller. For some transformation tasks, Python with SymPy will be utilized and an alternative using the MATLAB Symbolic Math Toolbox will be shown.
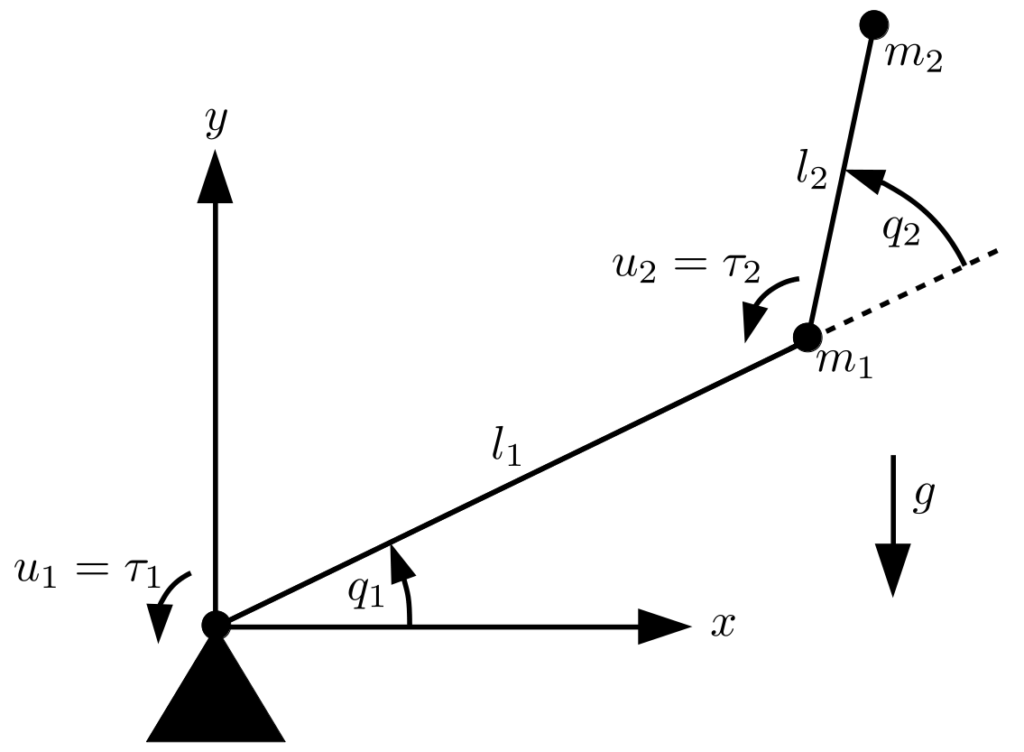
During the following, we are considering a robot with two links, two masses at the end of the links, and motors applying torque as control input at the joints. A diagram of the robot is shown below.
Linearize nonlinear state space equation in MATLAB at steady state setpoint
This post shows one way to linearize a nonlinear state equation ")
")
function dx = ode(t, x, u)
% example ODE
dx1 = tan(x(4)) * x(2) + 2*u(2) - 1;
dx2 = x(1) - sin(x(2));
dx3 = 13 * x(4) + u(1) + 1;
dx4 = 2*x(1);
dx = [dx1; dx2; dx3; dx4];
end
Calculate Levenshtein distance in MATLAB (words or characters) with Wagner–Fischer algorithm
This is a MATLAB implementation of the Wagner–Fischer algorithm.
Convert dSPACE ControlDesk measurements to MATLAB/Simulink timeseries (updated)
- With this updated MATLAB script, multiple dSPACE ControlDesk measurements can be imported with a single execution
- The result is saved as a tscollection (collection of timeseries) and all signals are saved with their corresponding name
- Access imported data with Simulink ‘From Workspace’ block and, e.g., dsp_tscs{1}.my_signal
Convert dSPACE ControlDesk measurement to MATLAB timeseries that can be used in Simulink
- dSPACE ControlDesk can export measurements to mdf4 files or mat files
- mat file exports can be converted to timeseries with this MATLAB script
- The timeseries can then be imported into Simulink with the ‘From Workspace’ blog
- Multiple signals can be imported at once
Example output:
>> import_dspace_mat_to_simulink_ts --Imported dSPACE mat file C:\Users\Nicolai\Nextcloud\foo.mat into workspace variable dsp_ts --Time: 0.000000 s to 42.399572 s, 423980 steps --2 variables are in dsp_ts: 'In1' 'In1_1'
Analytical convolution integral (Analytische Faltung) with Matlab and Maple
With  = Heaviside(t)")
Function 1 (e.g. input signal/Eingangssignal):
 = Dirac(t)")
 = \sigma(t-1) - \sigma(t-4)")
Function 2 (e.g. impulse response/Stoßantwort):
 = -\frac{1}{RC}\exp(-\frac{t}{RC})\sigma(t) + \delta(t)")