NMPC with CasADi and Python – Part 3: State-space equations of a 2-DOF robot with SymPy or MATLAB
CasADi is a powerful open-source tool for nonlinear optimization. It can be used with MATLAB/Octave, Python, or C++, with the bulk of the available resources referencing the former two options. This post series is intended to show a possible method of developing a simulation for an example system controlled by Nonlinear Model Predictive Control (NMPC) using CasADi and Python.
In this post, we will look at determining the system equations of a robot with two degrees of freedom in stace-space form. These state-space equations can be used for simulation and for developing a nonlinear model predictive controller. For some transformation tasks, Python with SymPy will be utilized and an alternative using the MATLAB Symbolic Math Toolbox will be shown.
During the following, we are considering a robot with two links, two masses at the end of the links, and motors applying torque as control input at the joints. A diagram of the robot is shown below.
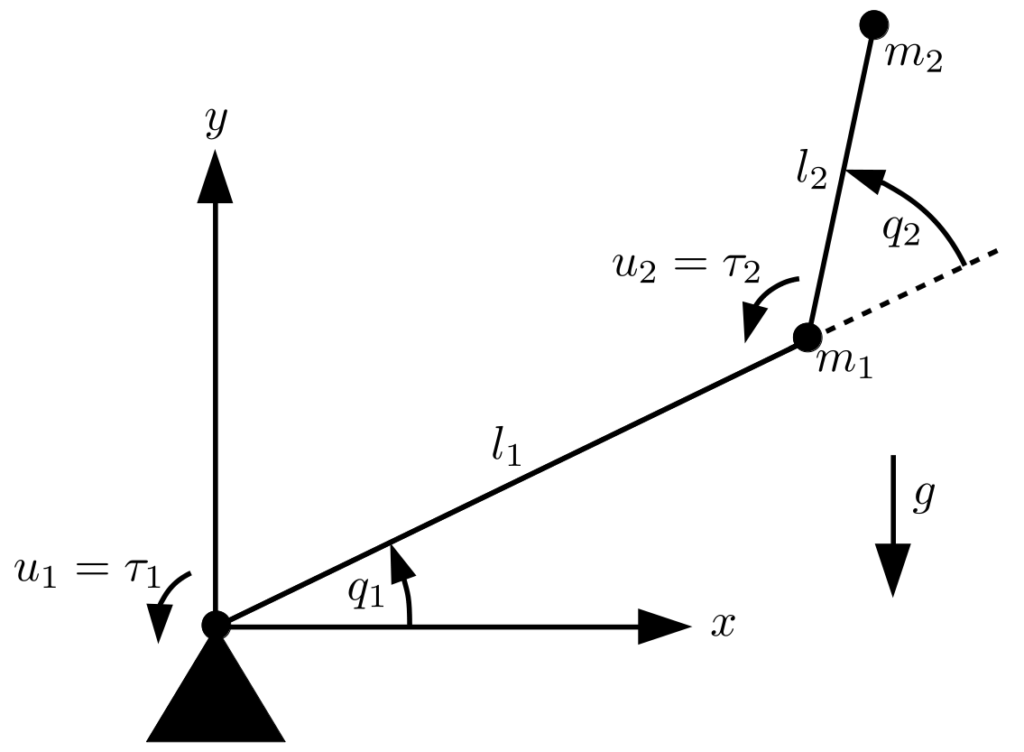
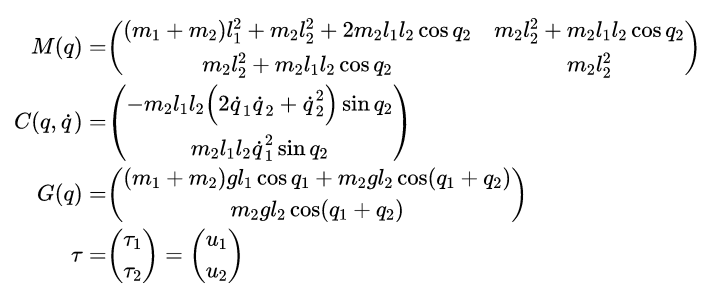
The set of nonlinear differential equations describing the dynamic behavior of a robot with joint angle vector 
 \ddot{q} + C(q, \dot{q}) + G(q) = \tau")
In this equation, ")



Determining the relevant matrices of the equation above for the considered robot is possible through multiple methods. A commonly used one is applying the Lagrangian method. For this, the kinetic energy 







For an equivalent robot system, the calculation steps are shown in Modeling of 2-DOF Robot Arm and Control by Okubanjo et al. Note, however, that there are some inaccuracies in this paper: Equation 13 is incorrect due to two missing squared operators. This is corrected from equation 15 onwards. Furthermore, the matrix form of the differential equation shown in equation 38 contains an additional 
These equations cannot be fed directly into CasADi though – we need a state-space representation. An obvious choice of a state vector for this system would be the two joint angles and angular velocities (

The other two rows for 

Code for Python / SymPy:
#!/usr/bin/env python3
from sympy import *
# masses of robot arms
m1, m2 = symbols("m1 m2")
# lengths of robot arms
l1, l2 = symbols("l1 l2")
# acceleration due to gravity
g = symbols("g")
# angles at robot joints
q1, q2 = symbols("q1 q2")
# 1st derivatives of angles
dq1, dq2 = symbols("dq1 dq2")
# 2nd derivatives of angles
ddq1, ddq2 = symbols("ddq1 ddq2")
ddq = Matrix([ddq1,
ddq2])
# control input torque
u1, u2 = symbols("u1 u2")
U = Matrix([u1, u2])
# matrix coefficients for intertia matrix M(q)
M11 = (m1+m2)*l1**2 + m2*l2**2 + 2*m2*l1*l2*cos(q2)
M12 = m2*l2**2 + m2*l1*l2*cos(q2)
M21 = m2*l2**2 + m2*l1*l2*cos(q2)
M22 = m2*l2**2
M = Matrix([[M11, M12], [M21, M22]])
# matrix coefficients for coriolis matrix C(q, dq)
C11 = -m2*l1*l2*(2*dq1*dq2 + dq2**2)*sin(q2)
C21 = m2*l1*l2*dq1**2*sin(q2)
C = Matrix([C11, C21])
# matrix coefficients for gravity vector G(q)
G11 = (m1 + m2)*g*l1*cos(q1) + m2*g*l2*cos(q1+q2)
G21 = m2*g*l2*cos(q1+q2)
G = Matrix([G11, G21])
# dynamic equations of robot
eq = Eq(U, M*ddq + C + G)
sol = solve(eq, (ddq1, ddq2))
print("ddq1 = {} \n\nddq2 = {}".format(sol[ddq1], sol[ddq2]))
This yields the missing two lines of the state-space system equation:
> python3 transform_equations_2dof.py ddq1 = (l2*(2*dq1*dq2*l1*l2*m2*sin(q2) + dq2**2*l1*l2*m2*sin(q2) - g*l1*m1*cos(q1) - g*l1*m2*cos(q1) - g*l2*m2*cos(q1 + q2) + u1) + (l1*cos(q2) + l2)*(dq1**2*l1*l2*m2*sin(q2) + g*l2*m2*cos(q1 + q2) - u2))/(l1**2*l2*(m1 + m2*sin(q2)**2)) ddq2 = -(l2*m2*(l1*cos(q2) + l2)*(2*dq1*dq2*l1*l2*m2*sin(q2) + dq2**2*l1*l2*m2*sin(q2) - g*l1*m1*cos(q1) - g*l1*m2*cos(q1) - g*l2*m2*cos(q1 + q2) + u1) + (dq1**2*l1*l2*m2*sin(q2) + g*l2*m2*cos(q1 + q2) - u2)*(l1**2*m1 + l1**2*m2 + 2*l1*l2*m2*cos(q2) + l2**2*m2))/(l1**2*l2**2*m2*(m1 + m2*sin(q2)**2))
Code for MATLAB / Symbolic Math Toolbox (this script can also be run with Octave, which then uses SymPy in the background):
% masses of robot arms
syms m1 m2;
% lengths of robot arms
syms l1 l2;
% acceleration due to gravity
syms g;
% angles at robot joints
syms q1 q2;
% 1st derivatives of angles
syms dq1 dq2;
% 2nd derivatives of angles
syms ddq1 ddq2;
ddq = [ddq1; ddq2];
% control input torque
syms u1 u2;
U = [u1; u2];
% matrix coefficients for inertia matrix M(q)
M11 = (m1+m2)*l1^2 + m2*l2^2 + 2*m2*l1*l2*cos(q2);
M12 = m2*l2^2 + m2*l1*l2*cos(q2);
M21 = m2*l2^2 + m2*l1*l2*cos(q2);
M22 = m2*l2^2;
M = [M11, M12; M21, M22];
% matrix coefficients for coriolis matrix C(q, dq)
C11 = -m2*l1*l2*(2*dq1*dq2 + dq2^2)*sin(q2);
C21 = m2*l1*l2*dq1^2*sin(q2);
C = [C11; C21];
% matrix coefficients for gravity vector G(q)
G11 = (m1 + m2)*g*l1*cos(q1) + m2*g*l2*cos(q1+q2);
G21 = m2*g*l2*cos(q1+q2);
G = [G11; G21];
% dynamic equations of robot
eq = M*ddq + C + G == U;
sol = solve(eq, [ddq1, ddq2]);
disp(ddq1 == sol.ddq1);
disp('');
disp(ddq2 == sol.ddq2);
Leave a Reply